
$104,750
Pledged
42%
Funded
21
Backers
28
Days to Go
Why NavBot-D1?
Most quadruped robots are either locked-down consumer gadgets or $50K+ research platforms. The D1 bridges that gap — real research hardware at an accessible price.
12 Degrees of Freedom
3 joints per leg with DAMIAO BLDC brushless actuators delivering precise torque control for dynamic locomotion, stair climbing, and terrain adaptation.
RDK X5 Compute Brain
Powered by the Horizon Robotics RDK X5 with 10 TOPS NPU — run SLAM, computer vision, and reinforcement learning policies directly on-board in real time.
CNC Aluminum Frame
Full 6061 aluminum body with CNC-machined leg linkages. Sheet metal panels for easy maintenance access. Built to survive the lab — and the field.
Open Source Stack
Ships with ROS2 Humble support, Python/C++ SDK, Gazebo simulation model, and full URDF. Modify everything — from gait algorithms to sensor fusion pipelines.
STEM & Education Ready
Curriculum-aligned lesson plans, step-by-step assembly guide, and visual block-coding interface for beginners. From high school to graduate research.
Modular & Upgradable
Mount LiDAR, depth cameras, robotic arms, or custom payloads via the universal top rail. Swap compute boards, batteries, and actuators without rewiring.

Built for Real-World Terrain
The NavBot-D1 doesn't just walk on flat floors. Its 12-DOF leg architecture and high-torque DAMIAO actuators enable dynamic locomotion across grass, gravel, slopes, and stairs.
The onboard IMU and optional depth camera feed real-time terrain data into the locomotion controller, allowing the robot to adapt its gait automatically — no manual tuning required.
Learn More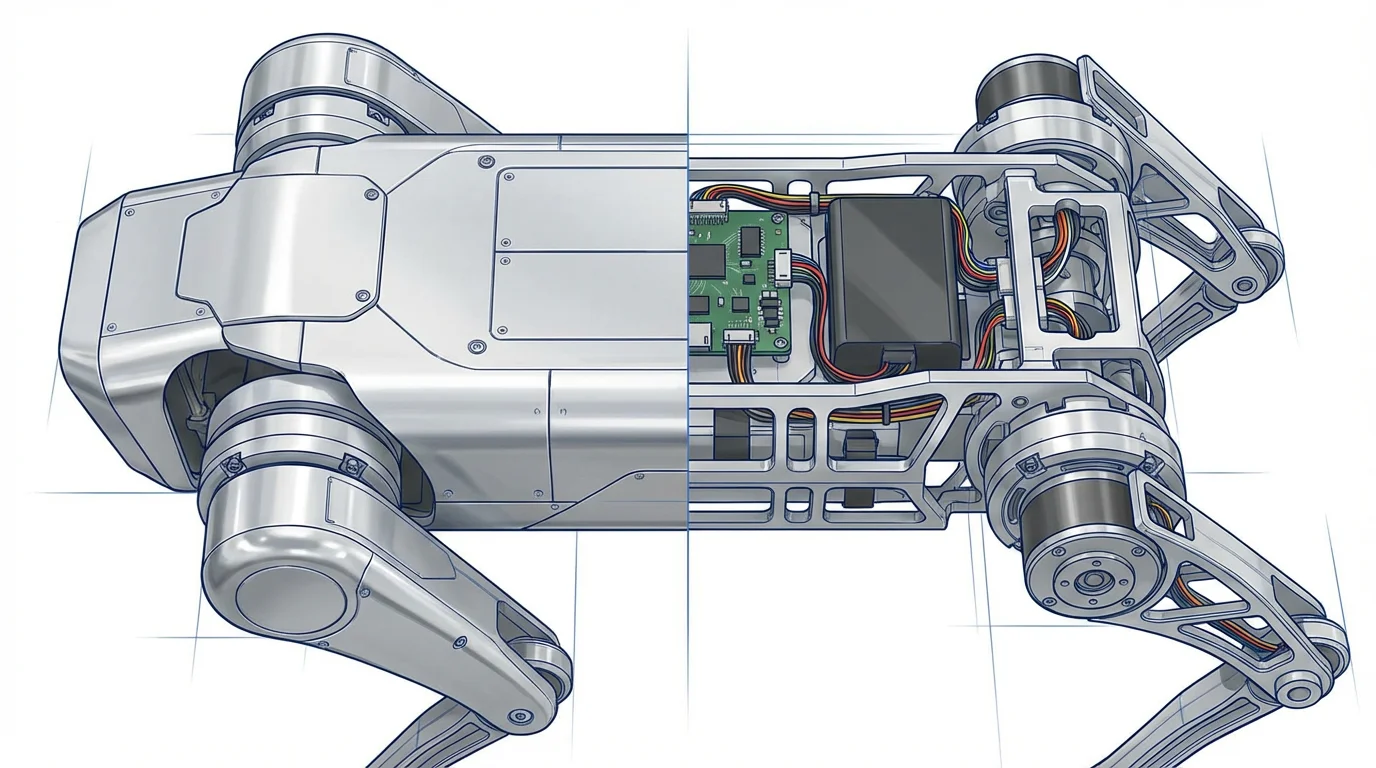
Engineering You Can See
We designed the D1 with full transparency. Open the top panels and you'll see every component: the RDK X5 compute board, DAMIAO actuator bus, power distribution board, and cable harness — all labeled and accessible.
This isn't a black box. It's a platform built for people who want to understand, modify, and improve their robot.
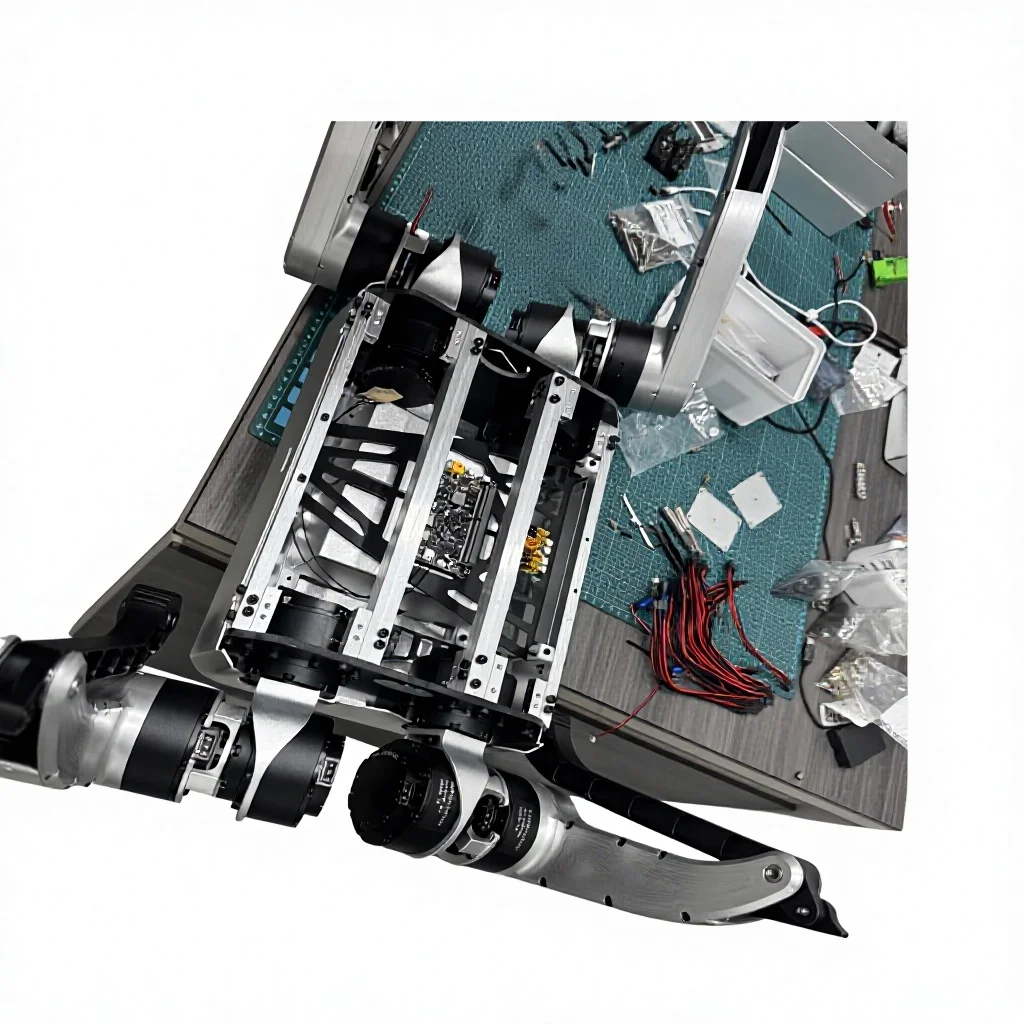
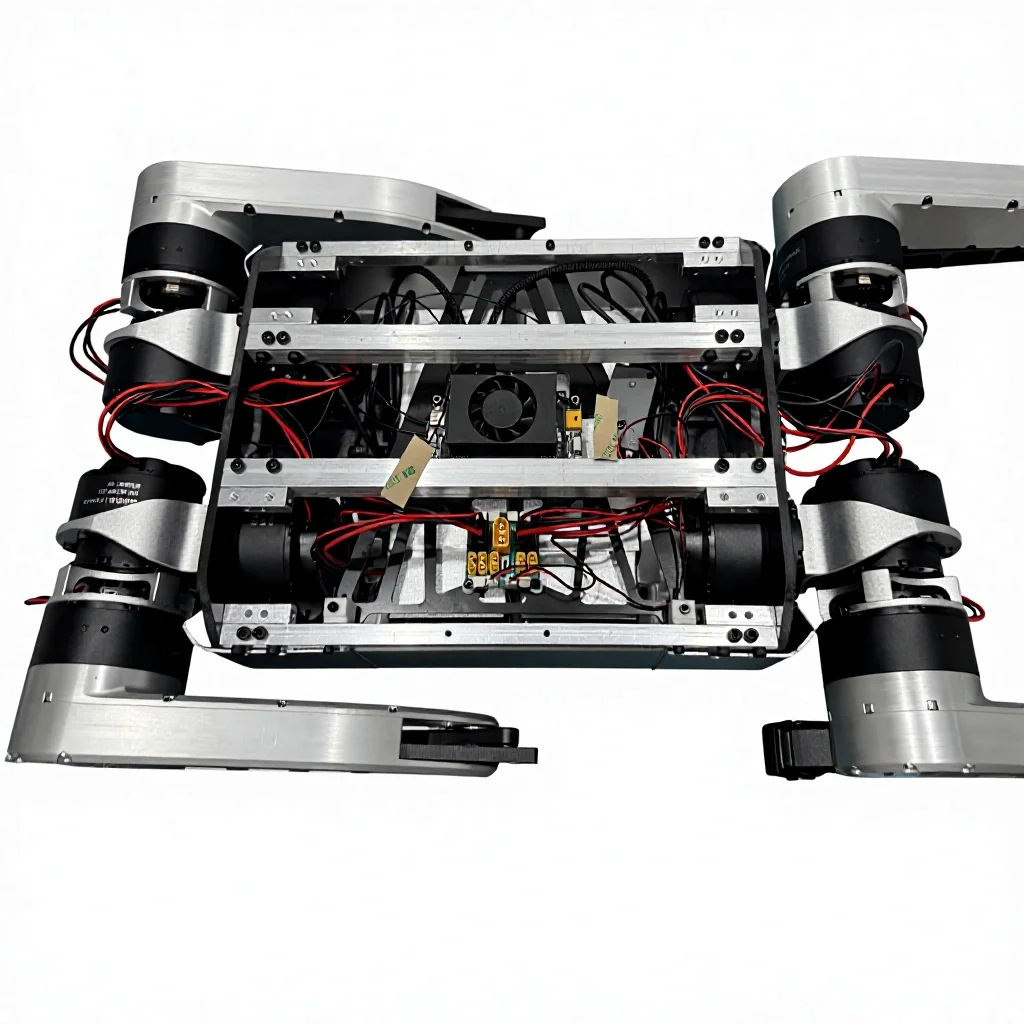
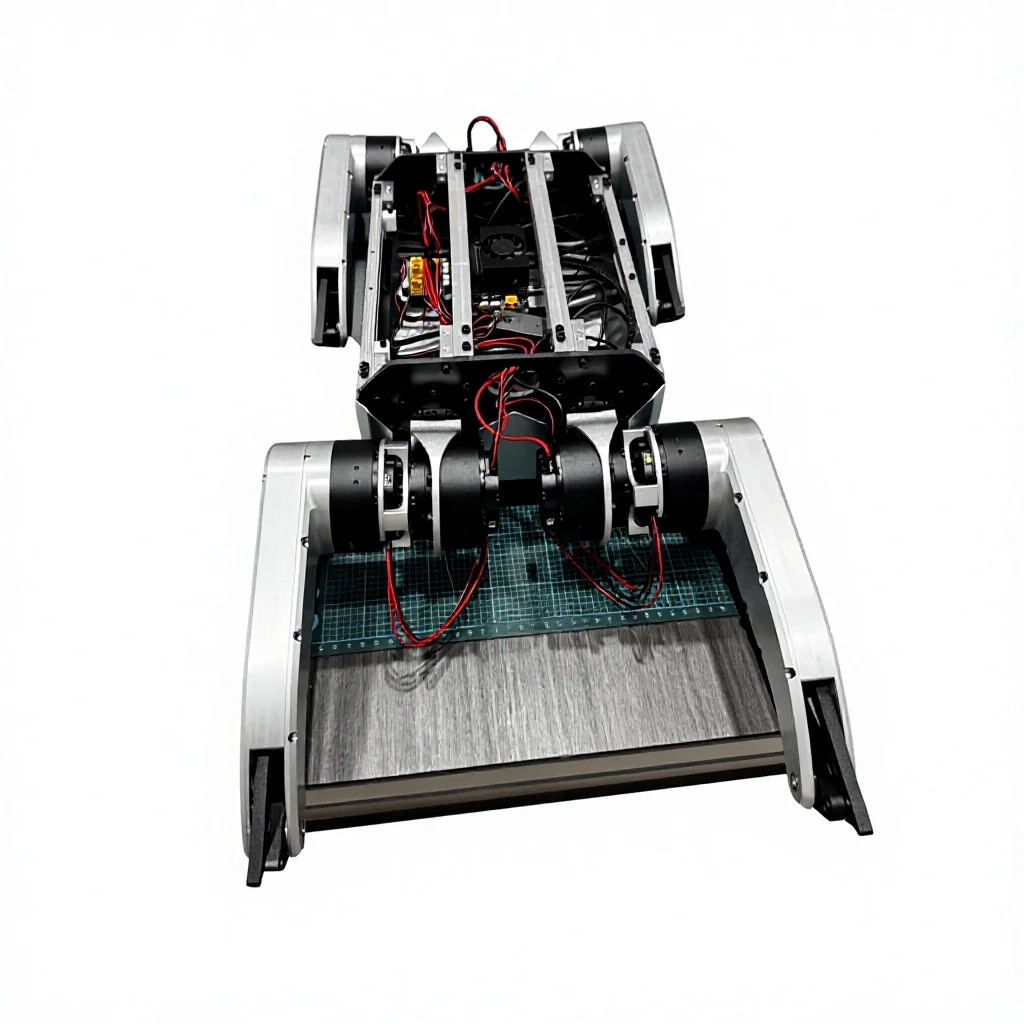
Product Gallery
Real photos from our workshop — what you see is what you get.



Technical Specifications
Research-grade components. No compromises.
| Degrees of Freedom | 12 (3 per leg × 4 legs) |
| Actuators | DAMIAO BLDC brushless motors with integrated encoders |
| Frame Material | 6061-T6 CNC aluminum + sheet metal body panels |
| Compute Board | Horizon Robotics RDK X5 (8-core ARM, 10 TOPS NPU) |
| OS & Framework | Ubuntu 22.04 + ROS2 Humble |
| Battery | 24V LiPo, ~45 min runtime (walking) |
| Weight | ~12 kg (fully assembled) |
| Dimensions | ~600mm L × 300mm W × 400mm H (standing) |
| Payload Capacity | Up to 3 kg top-mounted |
| Connectivity | Wi-Fi 6, Ethernet, USB 3.0, CAN bus |
| SDK | Python & C++ APIs, Gazebo URDF, RViz visualization |
| Sensors (included) | IMU, joint encoders, voltage monitor |
| Sensors (optional) | Intel RealSense D435i, RPLiDAR A1, ultrasonic array |
Choose Your Reward Tier
Early backers get exclusive pricing and priority shipping. All tiers include free shipping within the continental US.
Early Bird
- NavBot-D1 fully assembled
- RDK X5 compute board installed
- 24V LiPo battery + charger
- Starter SDK & tutorial access
- 1-year warranty
Developer Kit
- Everything in Early Bird
- Intel RealSense D435i depth camera
- RPLiDAR A1 360° scanner
- SLAM navigation demo pre-installed
- Priority shipping (Wave 1)
- Backer-exclusive Discord channel
Research Lab Bundle
- 3× NavBot-D1 Developer Kits
- Multi-robot coordination demo
- Spare actuator set (4 units)
- 4 hours 1-on-1 integration support
- Academic invoice + PO accepted
- Logo on backer wall
Project Timeline
We've already completed prototyping. Your pledge accelerates production tooling and first-batch manufacturing.
Prototype validation, DAMIAO actuator testing, ROS2 stack development
Campaign live, production tooling, CNC fixture setup, supplier qualification
First production run, QA testing, Wave 1 shipping (Developer Kit backers)
Wave 2 shipping (Early Bird), Research Lab Bundles, retail availability
Frequently Asked Questions
Is the NavBot-D1 a toy or a research platform?
Research platform. The D1 uses the same class of BLDC actuators and compute hardware found in robots costing $20K+. It runs ROS2, supports custom URDF models, and can execute reinforcement-learning locomotion policies in real time.
Do I need robotics experience to use it?
Not necessarily. The D1 ships fully assembled with pre-loaded walking gaits and a Python SDK. Beginners can control it via a gamepad or web UI. Advanced users get full ROS2 access, C++ APIs, and a Gazebo simulation environment.
What sensors are included?
The base unit includes an IMU, 12 joint encoders, and a voltage monitor. The Developer Kit tier adds an Intel RealSense D435i depth camera and RPLiDAR A1 for SLAM and obstacle avoidance.
Can I add my own sensors or payloads?
Yes. The top rail accepts standard M3 mounts. We provide CAD files for custom brackets. The CAN bus and USB ports allow integration of virtually any sensor.
What's the battery life?
Approximately 45 minutes of continuous walking on the included 24V LiPo. Stationary operation (compute + sensors, no locomotion) lasts ~2 hours. Spare batteries will be available as add-ons.
Do you ship internationally?
Yes. Free shipping to the continental US. International backers pay actual shipping cost calculated at fulfillment (typically $80–$150 depending on region).
What if the campaign doesn't reach its goal?
If we don't hit our $250K goal, all pledges are refunded in full. However, we've already completed the prototype and have supplier agreements in place — the campaign funds production tooling at scale.
Build the Future of Robotics.
Start with NavBot-D1.
Join 21 backers who are already building the next generation of quadruped robots.
Back This Project Now